VEX VRC V5 · For returning teams
Stop winging it. Start engineering.
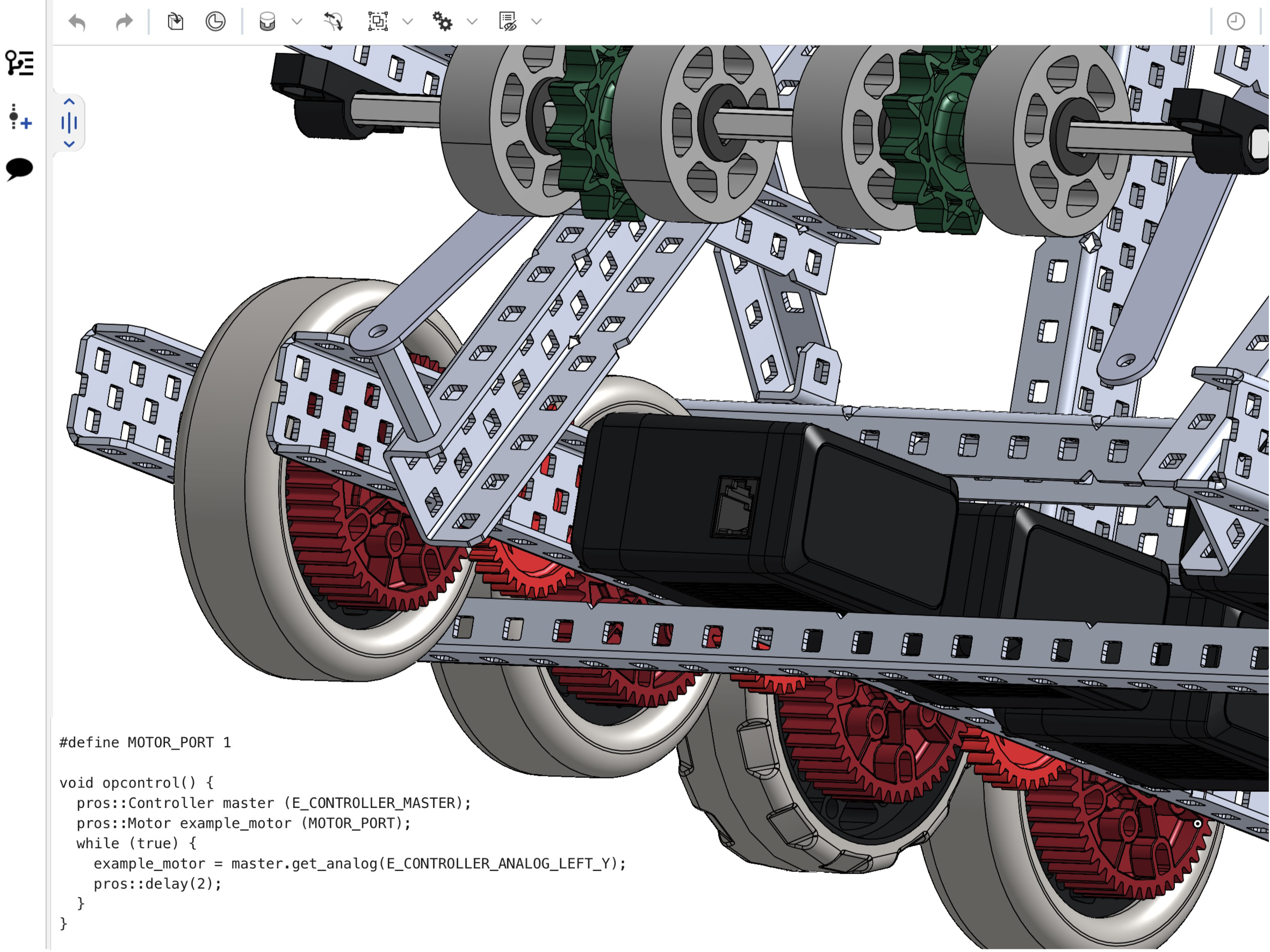
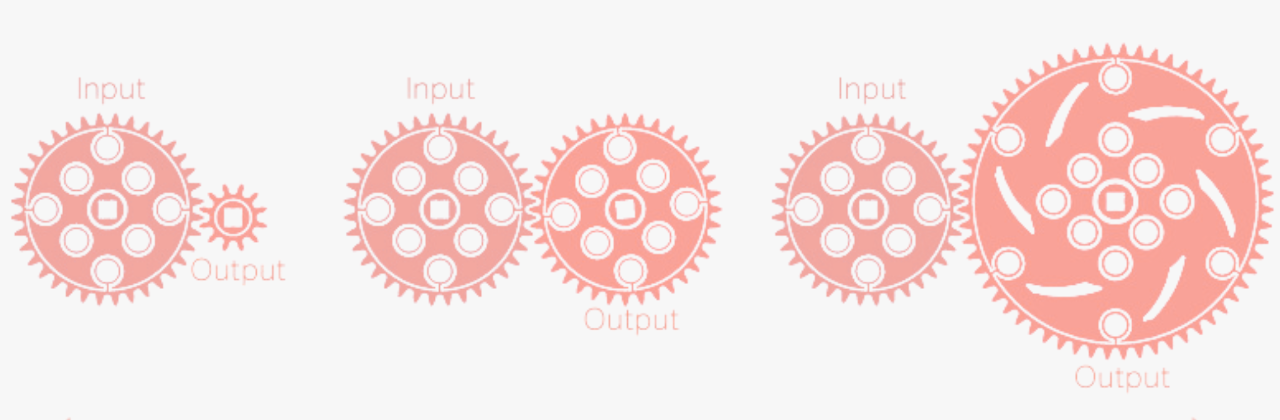
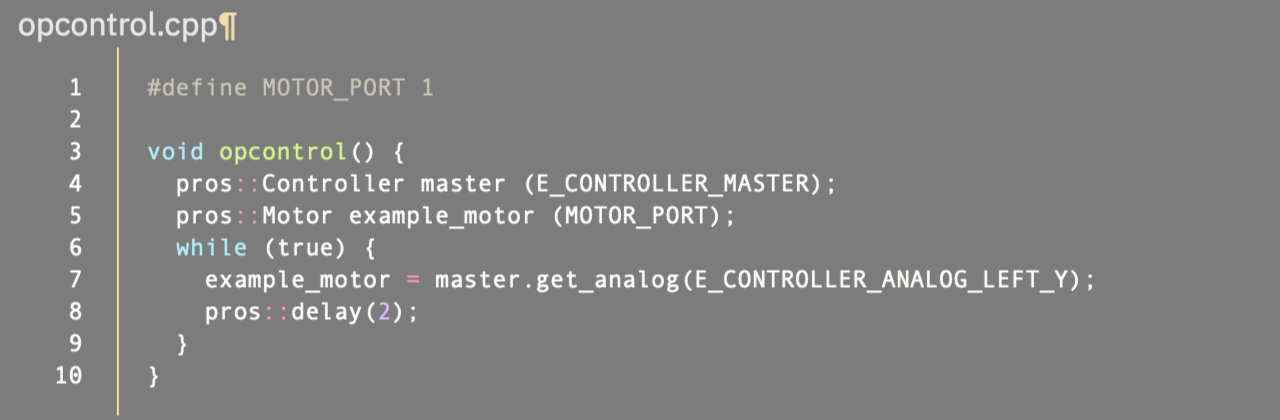
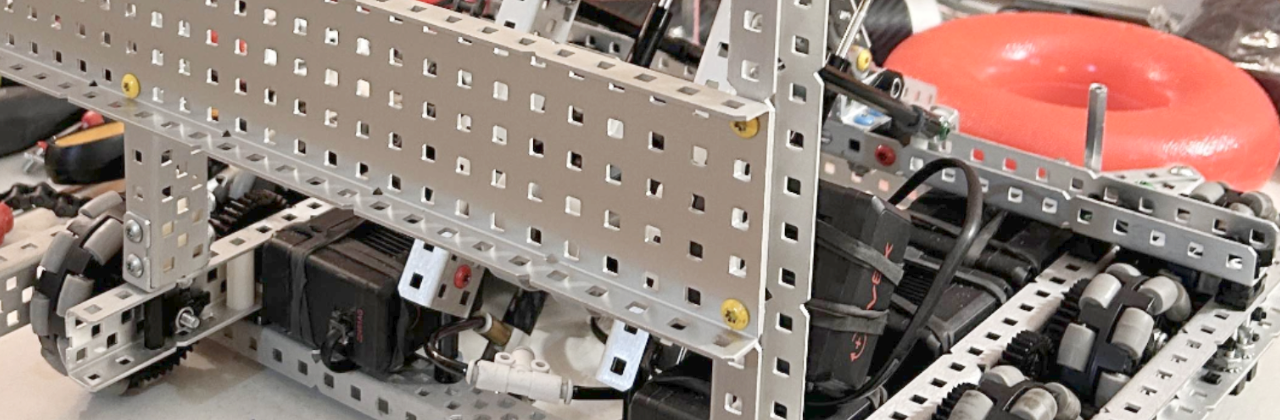
A six-strand curriculum for VRC V5 teams that already have one season behind them. Leave single-file VEXcode for C++, PROS, and LemLib. Leave guessing ratios for a real friction audit. Leave last-minute CAD for a team OnShape document with proper version history. Run coding, building, CAD, project management, and the engineering notebook as five parallel strands held together by one set of doctrines.